一、目的與應用
製作一個模仿蝙蝠於空中飛行時,利用本身的超音波,偵測前方物體距離的裝置。
二、所需零件
- MCC0002 (Arduino 控制器), 數量 : 1
- SSU0005 (PING 超音波距離感測器), 數量 : 1
- CMZ0054 (XBee Explorer USB連接板(PlayRobot)),數量 : 2
- CMZ0004 (XBee 1mW Wire Antenna通訊模組),數量 : 2
- LED, 數量 : 7
- 蜂鳴器,數量 : 1
- 按鈕開關,數量 : 1
- 電阻10K歐姆,數量 : 1
- 耗材:
- 杜邦線,排針數個
三、動作說明
利用超音波(Ping)偵測距離,配合BASIC Stamp的指令,便可以得到超音波資料,超音波距離在距離遠時伺服機擺動最快,距離中間時伺服機擺動中速,距離近時伺服機擺動低速,也就是當使用者接近超音波越接近時,翅膀動越慢。若按下預置的按鈕時,可切換到鋼琴模式,在這個模式下,可以利用超音波感測前方物體的距離變化,進而發出不同音頻的聲音。
四、製作說明
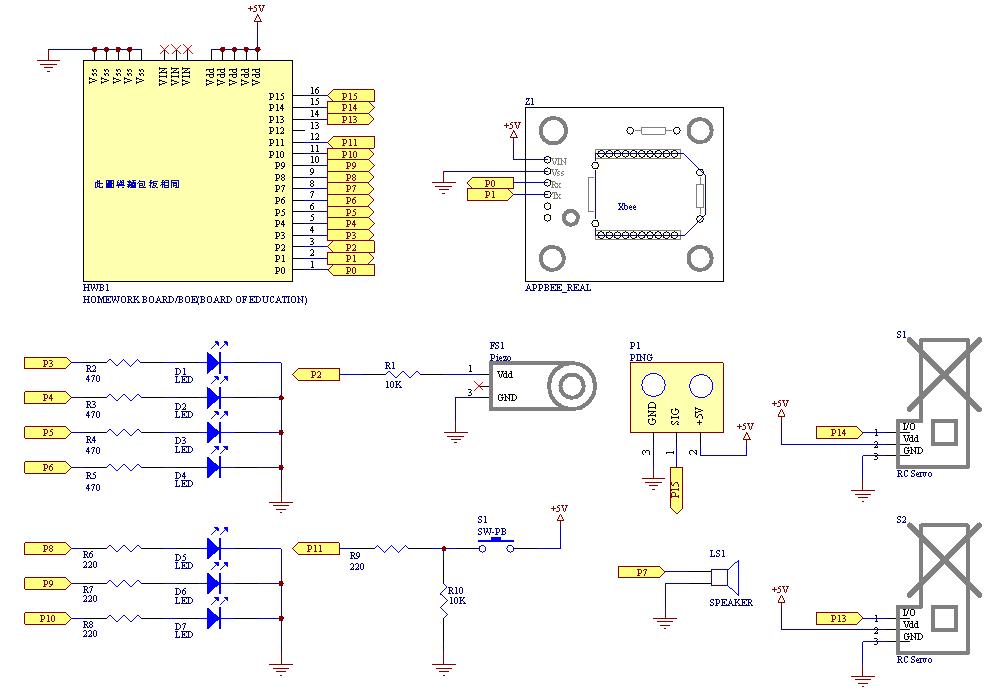
接線圖
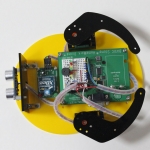
實體圖(因部分元件變更 僅供參考)

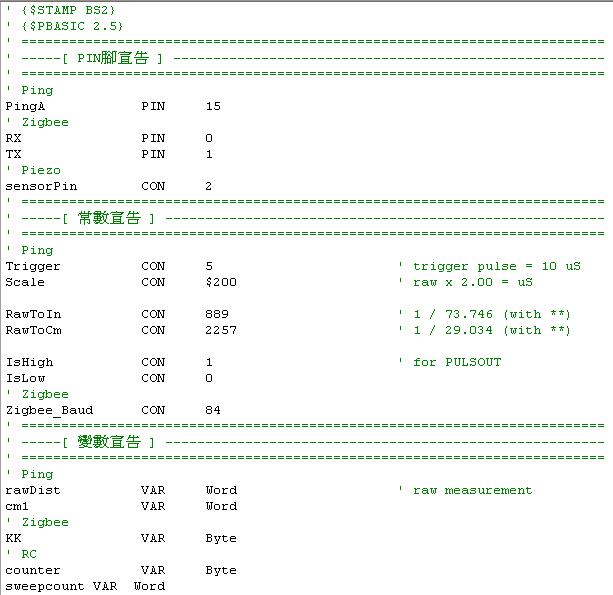
五、程式說明