一、相關產業
防災救災、海岸安全、船舶電機
二、相關零件
- 控制器系列
- Propeller Platform USB 開發板
- Propeller C3 開發板
- Arduino 控制器
- 運動控制系列
- Qik 2s12v10 雙軸串列馬達驅動器
- MD03 高功率H-Bridge馬達驅動器
- 感測器系列
- HOKUYO雷射測距儀(URG-04LX)
- PING 超音波距離感測器
- MTi-G發展套件 (慣性導航儀)
- CHR-UM6 方向感測器
- GPS全球衛星定位系統
- 通訊模組系列
- 人機介面系列
- 迷你電腦 SI-18
- 雙軸搖桿模組
三、簡述
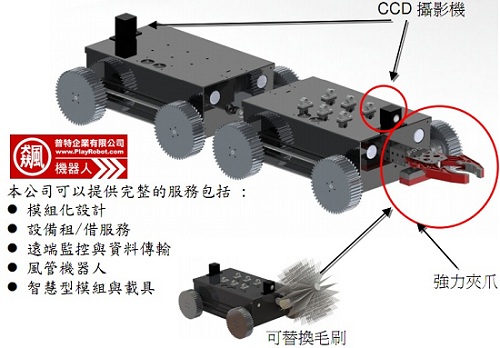
本公司致力開發各類智慧型機器人所需的模組產品,已經生產過各式的感測器模組、通訊模組、可回授馬達控制模組與各式無人載具系統的研發。本開發計畫,設計出一具「自主式導航水面載具開發系統」,其預計整合數種感測器與水面載具平台,除了可以達成遠端遙控外,並可透過GPS等感測系統自主式移動與定位,目的是將過去開發的各種模組化感測元件與智慧型軟體系統整合應用在此平台之中。
它具有以下幾種特色 :
- GPS點對點戶外自動導航
- 3.5G/RF/WiFi等三種無線通訊與控制
- 戶外障礙物自動迴避機制
- 太陽能充電
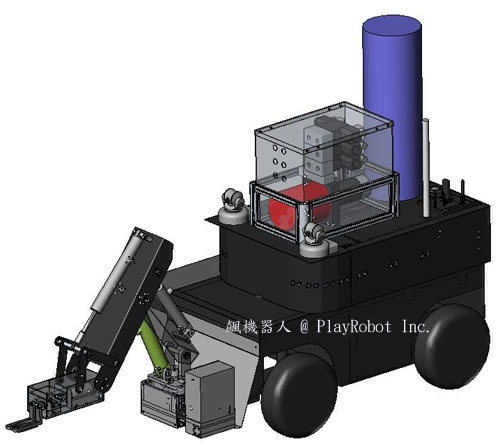
- 發展USV載具主體與電源動力系統
- 開發智慧型推進系統控制
- 架設遠端遠距離通訊系統
- 開發無人導航自動駕駛系統
- 發展船舶自動避障系統
四、功能簡介
- 全系統自主開發,可以新增或修改功能,適合研究單位或特殊用途。
- 全系統自主開發,可以提升路徑控制法則的能力,根據需求去開發。
- 在自主式導航的方面,因為必須結合GPS衛星定位系統,IMU導航儀, 以及多重避障感測模組的應用
- 利用這套導航設備,可以讓使用者無須操作搖桿,只要事先規劃好航跡, 船體便可以自主式完成巡邏任務,從事海洋調查或是研究的單位, 可以更有效率提升研究與取樣的成果
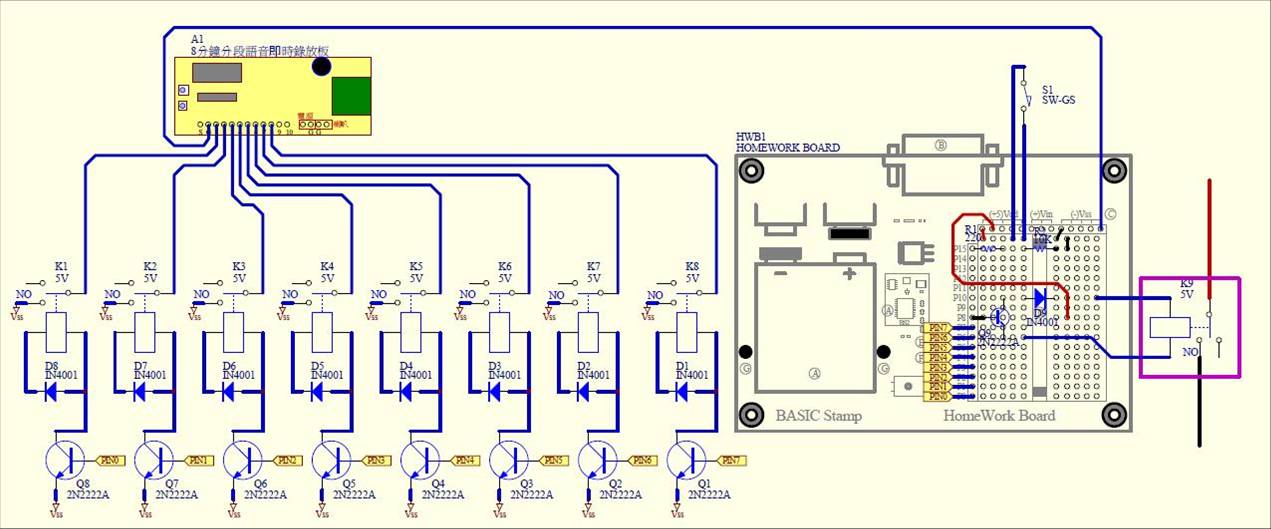
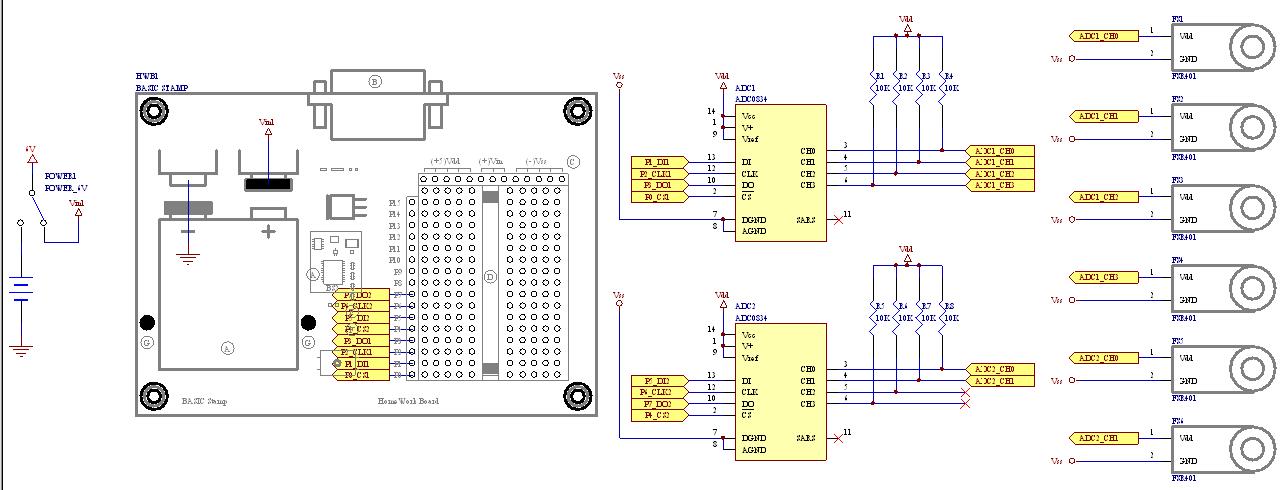
功能區塊表
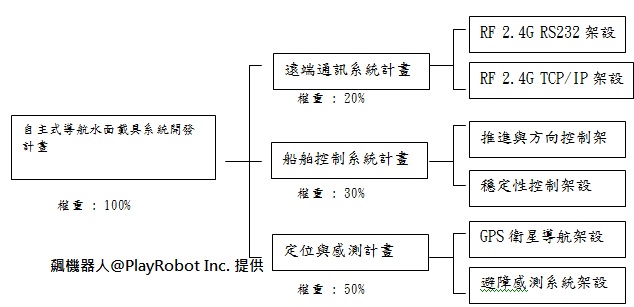
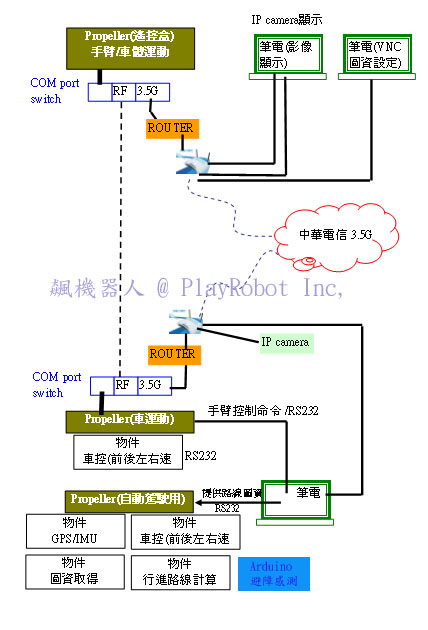
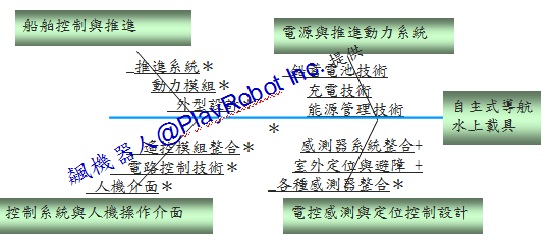
技術關聯魚骨圖
相關測試影片