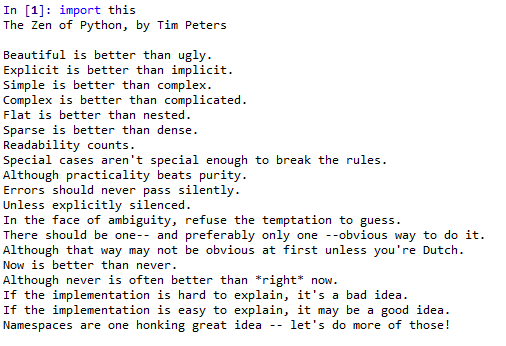
Special cases aren’t special enough to break the rules.
特例也不該違背這些規則,
Although practicality beats purity.
即使實用性打敗了純粹性。
這些規則應當遵守,就算傷害了程式碼的實用性。
Errors should never pass silently.
錯誤不該被無聲地忽略,
Unless explicitly silenced.
除非你如此期望。
除非需要,否則要捕捉所有的錯誤。
In the face of ambiguity, refuse the temptation to guess.
面對雙關的語意時,拒絕猜測的誘惑。
There should be one– and preferably only one –obvious way to do it.
用明顯的方法來完成一件事,而且最好只有一種。
不要去猜想完成程序的方式,只需要用一種明顯的解法。
Although that way may not be obvious at first unless you’re Dutch.
這並不是件容易的事,誰叫你不是荷蘭人呢?
找出一種明顯的解法,在一開始並不容易,畢竟我們都不是Python之父。
Now is better than never.
把握現在勝於停滯不前,
Although never is often better than *right* now.
即使停滯不前勝於立刻動手。
先考慮過程式是好的,但必須要動手寫。
If the implementation is hard to explain, it’s a bad idea.
如果實作難以被說明,那就是個壞主意。
If the implementation is easy to explain, it may be a good idea.
如果實作能輕鬆說明,那可能是個好主意。
能夠被說明的程式才是好程式。
Namespaces are one honking great idea — let’s do more of those!
命名空間是個絕妙的點子,我們應當多加利用!
善用python的命名空間。
上面的「禪」中有幾個有趣的地方:
Right now一般可以解釋為「現在」,而這裡卻也能做為「正確」解釋。
「即使不做出程式,勝於找出並完成有『正確』作法的程式;作出程式仍勝於不動手做。」
所謂的「正確」作法,可能是指為了心中的完美而加入不必要又難以維護的功能;又或者是為了盡早發佈而留下糟糕的結構。這兩者在開發實務上都是正確的,但也都會帶來麻煩,還不如不做。
這是一個雙關句,然而「禪」中卻要我們停止猜測雙關,找出簡單的解釋:現在。
Dutch是荷蘭人的代稱,用來指Python之父吉多·范·羅蘇姆(Guido van Rossum)。
備註2:根據不太能確認的回憶,布萊恩是使用小時候看過的卡通中的台詞。
「In interview with Forbes India, he said his memory’s dim. “What I do remember is that I had seen a cartoon that showed an egg and a chick and the chick was saying, “Hello, World.”」 ( from The History of ‘Hello, World’ )
吉多·范·羅蘇姆,一個荷蘭的程式設計師。他參與了荷蘭數學和計算機科學研究學會(Centrum Wiskunde & Informatica,CWI,英文為National Research Institute for Mathematics and Computer Science)的一個教學計畫,目標是在教導非專業的人們學習如何開始寫程式。這個計畫後來稱為ABC語言。
AI 自然語言模組,讓您秒殺AI語音助理、機器人智慧音箱、智慧音控無所不控、聽聲辨位的聲源定位(DOA)、….等成為最Hot的專題,換言之Pepper、Zenbot、小愛同學、SiRi..能做的事,我們以教學的角度紮實的教您用Python做出來;但我們機器人能做的事、您課程舉一反三能做的事,別人就不會做了!到此,只不過進入聲音單元就這麼有趣了。接下來 加入
AI 視覺辨識模組,神經網路與影像處理掌握AI自駕與道路辨識,人臉辨識、車牌辨識、商品辨識….. 等等,您的成果將聽得懂人話,識得了名畫。最後,透過AIoT的導入,您將大放異彩,進而做智慧管家、AIoT雲端控制或收集資料、人機介面…。讓您的AIoT課程從教學、應用、競賽、證照一次搞定。